I have conducted fundamental research in many different areas including autonomous guidance, navigation, and control of air, land, and marine vehicles, as well as problems for humanoid robots manipulating object-cluttered environment. My research focuses on improving performance of robotic systems with supervised autonomy through the application of planning, feedback control, integrated sensing systems.
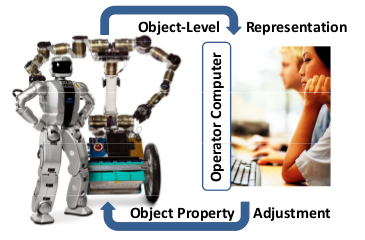
The language-based interaction of the human-robot team is the core focus of my recent work. I’m trying to develop techniques which enable human operators to interact with robots at a highly-intuitive task-level, where the human has full strategic control and commands tasks or objectives, and the robot autonomously performs lower-level tasks such as path/motion planning and precision task execution, while communicating with each other at task/object-level.
This tightly-coupled, supervised autonomy allows human-robot systems to take advantage of the relative strengths of each member of the team : humans in reasoning, interpretation, and perception, and robots in precise control, efficiency, and repeatability. At all times the human is capable of stepping down to a lower level of control, if the robot finds a task which it is not intelligent enough to complete, which makes systems very robust to unknown or unexpected situations.