“At PAIR Lab, we develop and apply robotics, control, and AI technologies to solve real-world engineering problems.”
Collaborator
Collaborator
Collaborator
Collaborator
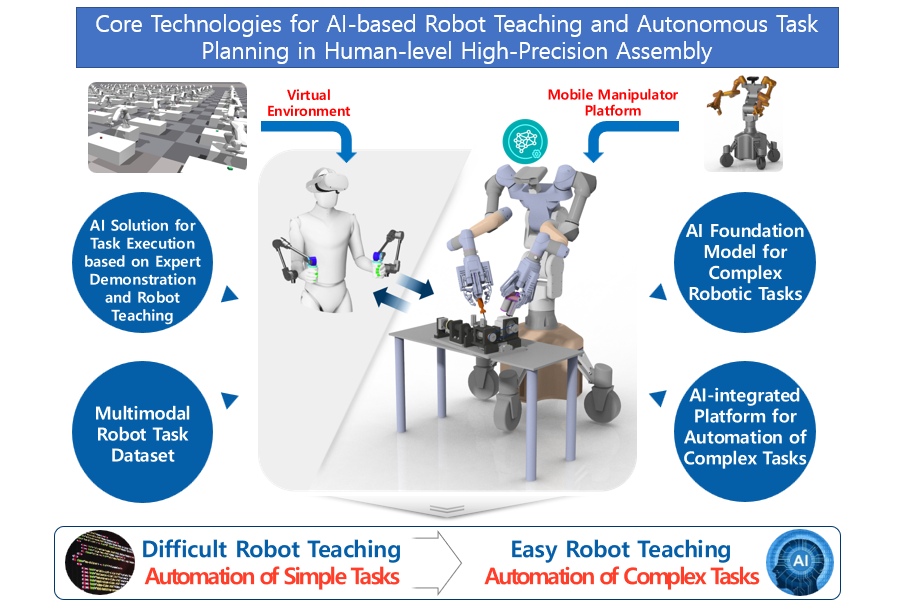
Creating robust, learning-based robot manipulation policies that can learn precise and complex assembly tasks from human demonstrations with high efficiency.

Designing and deploying advanced, radiation-tolerant mobile robotic platforms to carry out emergency operations inside nuclear power plant facilities.

Developing space-grade robotic arms and manipulators capable of autonomous docking, servicing, and exploration on orbital and planetary missions.
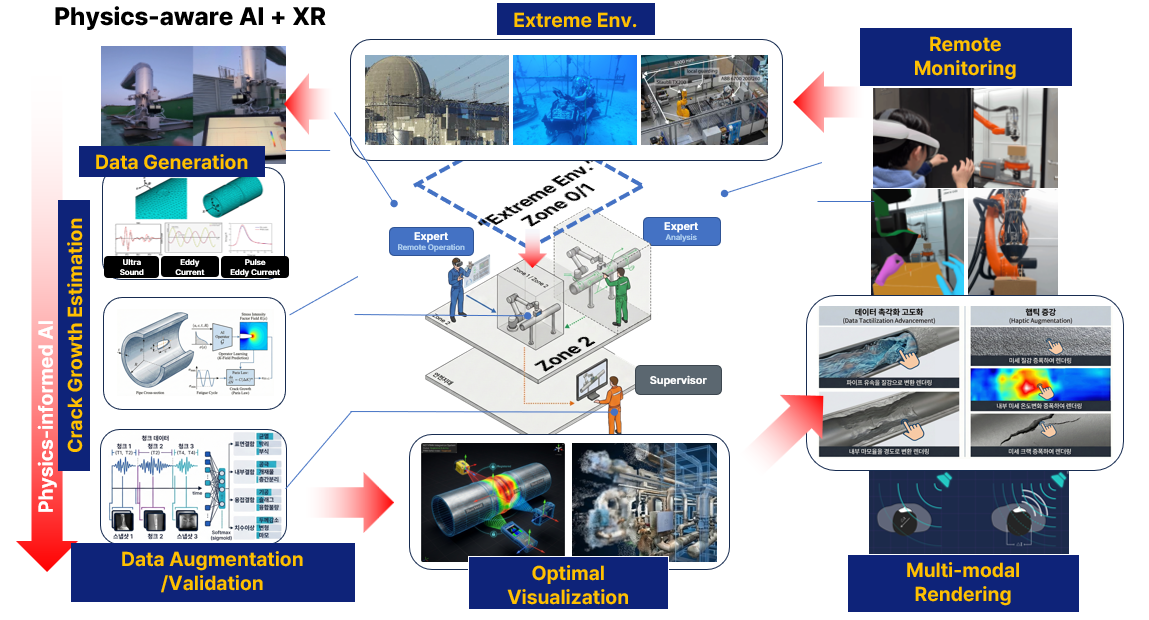
Establishing next-generation teleoperation systems leveraging digital twin virtual worlds, physics-informed machine learning, and hyper-sensory XR interfaces.
| Project Title | Role | Period |
|---|---|---|
| Space Challenge: Mars exploration system | PI | Apr. 2023 - Mar. 2025 |
| LiDAR-only semantic SLAM for nuclear application | PI | Apr. 2022 - Dec. 2023 |
| Object classification & pose estimation using scan data | PI | Apr. 2019 - Mar. 2022 |
| Robotic digital twin for nuclear decommissioning | Co-I | Apr. 2022 - Dec. 2024 |
| Robotic cutting system for nuclear decommissioning | Co-I | Mar. 2017 - Dec. 2021 |
| Jordan Research Reactor, Kijang Research Reactor | Co-I | Mar. 2015 - Feb. 2017 |
Annals of Nuclear Energy, Vol. 222, 111590, 2025
Nuclear Science and Engineering, Vol. 199. pp.1325-1336, Aug. 2025
Annals of Nuclear Energy, Vol. 195, 110182, 2024
Journal of the Korean Society for Nondestructive Testing, Vol. 43 (6), pp. 458-467, 2023
Sensors, Vol. 22 (23), 9053, 2022
Journal of the Korean Society for Nondestructive Testing, Vol. 41 (1), pp. 19-24, 2021
2026 IEEE International Conference on Robotics and Automation (Poster Session), Jun. 2026
21st Korea Robotics Society Annual Conference, Feb. 2026
25th International Conference on Control, Automation and Systems, Nov. 2025
Transactions of the Korean Nuclear Society Autumn Meeting, Oct. 2025
ICRA 2025 Workshop on Acoustic Sensing and Representations for Robotics, May 2025
2025 IEEE International Conference on Robotics and Automation (Poster Session), May 2025
Spring Meeting of Korea Society of Mechanical Engineers on Dynamics, Controls, and Robotics, Apr. 2025
International Symposium on Future I&C for Nuclear Power Plants, Dec. 2024
International Symposium on Artificial Intelligence, Robotics and Automation in Space, Nov. 2024
American Nuclear Society Meeting on Decommissioning, Environmental Science and Remote Technology 2024, Nov. 2024
Korea Society of Radioactive Waste Autumn Meeting, Oct. 2024
Korea Society of Radioactive Waste Autumn Meeting, Oct. 2024
International Topical Workshop on Fukushima-Daiichi Decommissioning Research 2024, Oct. 2024
39th Annual Meeting of Institute of Control, Robotics and Systems, Jul. 2024
ICRA 2024 Workshop on Robotics for Nuclear Environments, May 2024
Korea Society of Radioactive Waste Autumn Meeting, Nov. 2023
38th Annual Meeting of Institute of Control, Robotics and Systems, Jun. 2023
38th Annual Meeting of Institute of Control, Robotics and Systems, Jun. 2023
ICRA 2023 Workshop on Robot Assisted Safe Manipulation of Hazardous Materials, Jun. 2023
Transactions of the Korean Nuclear Society Spring Meeting, May 2023
Patent list is currently being compiled and will be updated soon. Please check back later.